
Hola amigos, estudiantes y aficionados, el día de hoy les mostraremos un tutorial acerca de la construcción de un robot móvil capaz de evadir obstáculos en respuesta al correo que recibimos de nuestro amigo Jesús Gómez Guerrero en el cual nos expresa su interés en relación con este tutorial.
Comencemos con la lista de
materiales.
Materiales:
- 1 Pila de 6 volts.
- 2 Moto reductores.
- 1 Arduino uno o cualquiera de la familia.
- 2 Pedazos de hoja plástica o madera.
- Cables para las conexiones.
- 1 Sensor Ultrasónico HC-SR 04.
- Driver L298N.
- 2 Llantas.
- 1 Servomotor de 1.5kg.
El principal objetivo del robot
es decidir de acuerdo a la comparación
de distancia de su izquierda y derecha el sentido de giro, de ésta manera evade los obstáculos detectados.
Paso
1. Construir
un chasis utilizando 2 moto reductores con sus respectivas ruedas.

Paso 2.

Paso 3
Por ultimo ensamblamos un servomotor de 1.5kg con
el sensor ultrasónico.

También les compartimos el circuito electrónico en fritzing así como el link con el código en Arduino.
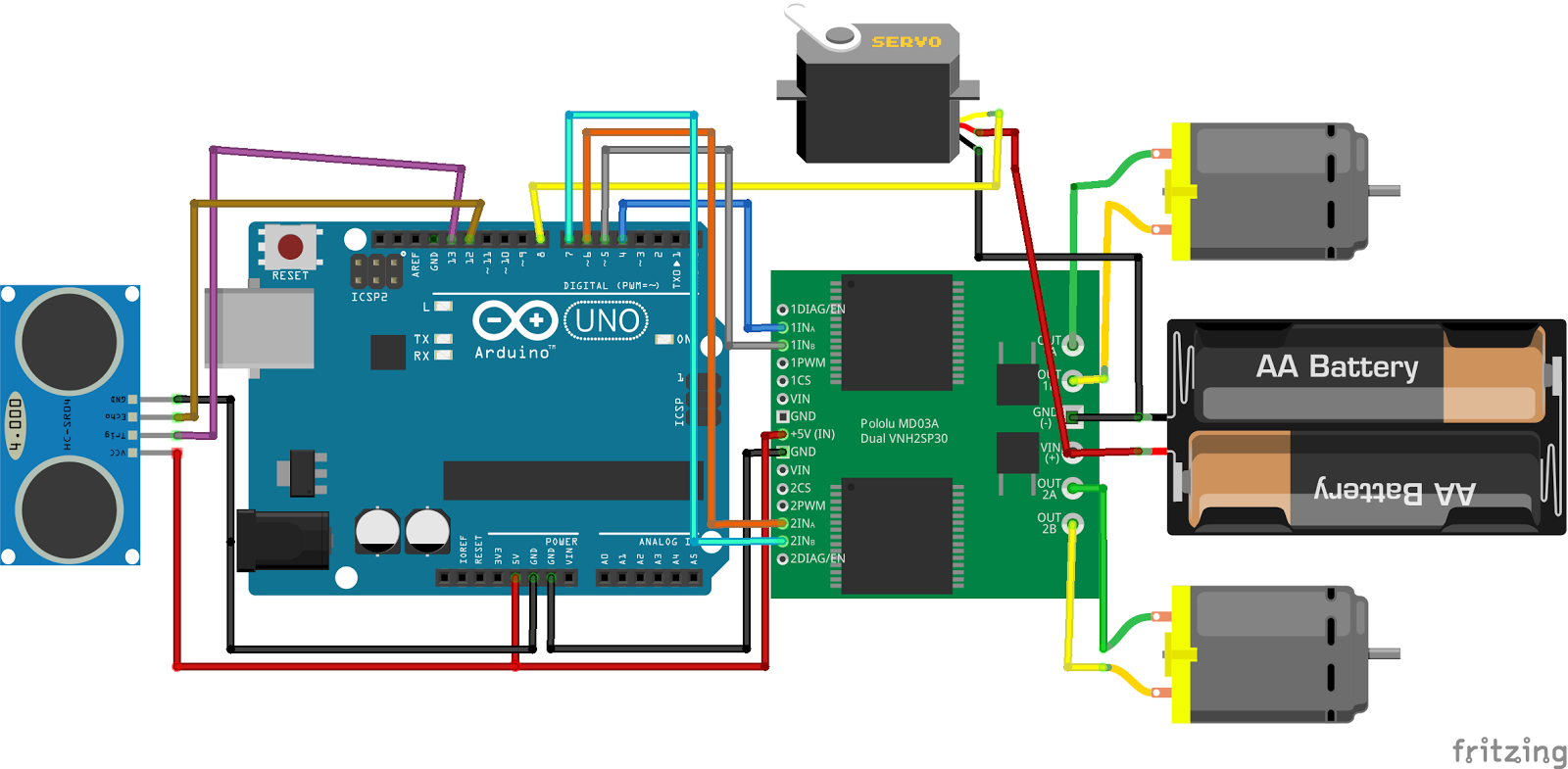
Nota: El driver que se muestra en la imagen de Fritzing, solo es con fines ilustrativos, aunque es posible usar cualquier otro tipo de Driver o en su defecto un Puente H.
buenas disculpa pero no conpila
ResponderBorrarQue error te arroja amigo? podrías mandarnos alguna imagen para poder solucionar el problema?
BorrarDe antemano gracias por interesarte en el proyecto.
Saludos!!
es ta controlado tanbien con el celular
ResponderBorrarNo amigo, la idea del evasor de obstáculos, es que por si solo pueda decidir hacia donde ir evitando los obstáculos, podría controlarse por celular pero harían falta algunos otros componentes.
Borrarse puede hacer con un puente h regular
ResponderBorrar?
Claro que si, siempre y cuando tu puente H soporte la corriente que demanden tus motores.
Borrar